National Taiwan University
Implementation
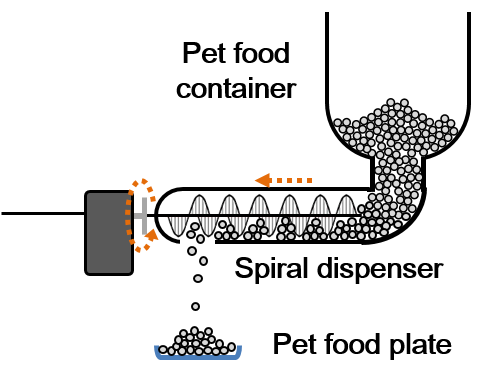
How does the automatic pet food dispenser work?
The automatic pet food dispenser consists of a pet food container, a spiral dispenser and a pet food plate. The spiral dispenser is connected to the servo motor. Once the servo motor is triggered and start rotating, the spiral dispenser will push the pet food out.
Automatic pet food dispenser
How do we use Firebase API to establish robust connection?
We try to construct a request/response connection model between the browser
(which acts like a client) and the environmental monitoring system(which acts
like a server). To illustrate the idea, we take light control for example and
some trivial checks are skipped. Note that true means ‘on’/’turn on’ and false
means ‘off’/’turn off’ for relay/status.lightIsOn and
relay/command.switchLight, respectively.
- Whenever the user click the light bulb button, the client will check if
relay/command.switchLightis equal torelay/status.lightIsOn. If so, then the client will changerelay/command.switchLightinto the target state. Ifrelay/command.switchLightis not equal torelay/status.lightIsOn, it means the server has not completed the last command sent by the clients so we simply skip it. - The server listens on
relay/command.switchLight. Whenever its value is changed, the server will change the relay controlling the light bulb into the target state. - After the server has successfully change the state, the server will change the
relay/status.lightIsOninto the current state of the relay controlling the light bulb. Note that this is why we say ifrelay/command.switchLightis not equal torelay/status.lightIsOn, it means the server has not completed the last command sent by the clients. - The client listens on
relay/status.lightIsOn. Whenever its value is changed, the client will change the unlighted light bulb image into lighted light bulb image or in the opposite way.